An All Purpose Unmanned Vehicle -(Group 3)
INTRODUCTION
Unmanned vehicles received their fame after the successful launch of self-driving cars by Google Inc. Following this, the projects based on unmanned vehicles took deeper roots. Sooner the aspects of human capacity/endurance, safety, reliability started gaining attention. The industries got keen on developing an Automated Guided Vehicle for warehouse management (AGV). The Defense forces desired to replace human intervention to carry supplies to the camps located on top of hills and also to defuse/detect landmines. Under these motivations, an appreciable amount of work has been accomplished on unmanned vehicles.
MOTIVATION
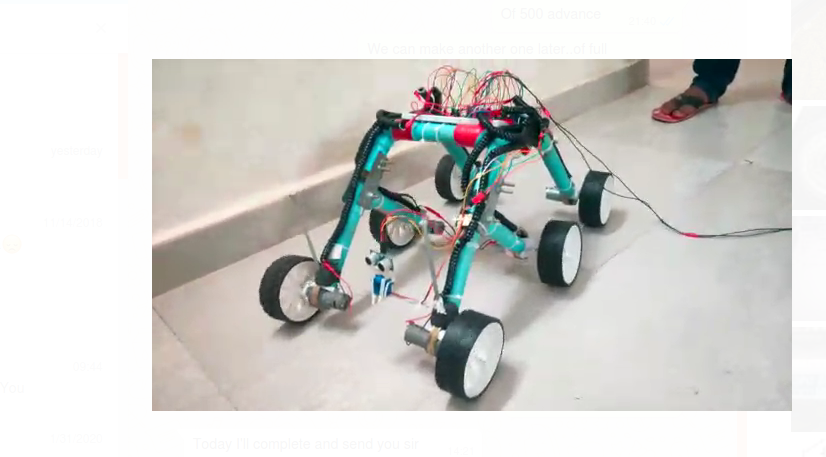
With this background, we, a group of four Undergraduate students from the ECE department of the Indian Institute of Information Technology(IIIT) Sricity, started working on a prototype of an All-purpose Unmanned vehicle. The system is able to traverse on rough terrains such as muddy roads, sloping hills, water-logged paths even climb a few steps. A demonstration of these capabilities can be found here. Our first prototype can be seen in the figure below. METHODOLOGY
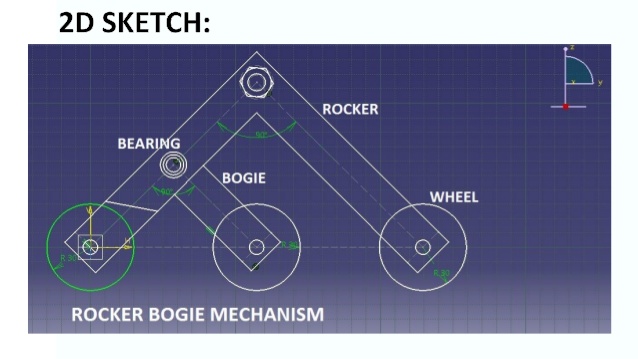
The design of the mechanical structure is based on the Rocker-Bogie mechanism (refer to the figure below). The vehicle is 3 feet long, 1 foot wide and 1.5 feet high. It is powered by a 12V, 10Ah Lithium-Ion battery. The structure is driven by 12V, geared DC motors. It is able to carry weights up to 3-4 kgs. The speed and direction of motors are controlled by the Arduino Uno microcontroller. The vehicle is installed with IR sensors for the obstacle-detection feature.
CHALLENGES
- The choice of wheels has to be made based on the dimension of the obstacle, desired to overcome. We had to generalize the size of an obstacle to choose the wheel size (150 mm). This is an assumption we are going by.
- The outer material of the wheel needs to provide a good grip for every surface. For example on rough muddy roads, hard rubber performs well, whereas, on smooth surfaces, flexible rubber with grooves provides a better grip.
- The weight of the structure has to be optimized when considered for its strength and rigidity and while dealing with its climbing operation on sloping hills.
POTENTIAL APPLICATIONS
- Guided Vehicle: The model can be used as a guided vehicle to carry payloads either for military applications (eg. sending medical assistance kits to the military bases on the hill-tops) or Industrial applications (eg. mobilizing goods within the warehouse)
- Wheelchair: The model could be developed as a wheelchair that climbs stairs to carry disabled people. (Social cause).
- Surveillance: The vehicle could be used as Unmanned Ground Vehicles for surveillance applications. It finds its utility in Anti-Theft Surveillance at public places (Civil application), detection of mines/explosives (Military Use).
FUTURE WORK
We are working towards developing another prototype that could carry heavier weights up to 7-10 kgs and could even climb stairs with the weight.



Comments
Post a Comment